










Feeding 9 Billion: Innovations in Agricultural Modeling
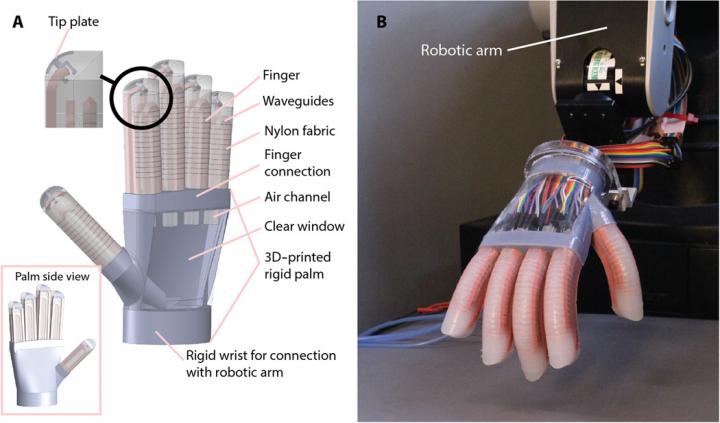
(A) Schematic of hand structure and components; (B) image of the fabricated hand mounted on a robotic arm with each finger actuated at ΔP = 100 kPa. (Video)
Credit: Cornell University
A group led by Robert Shepherd, assistant professor of mechanical and aerospace engineering and principal investigator of Organic Robotics Lab, has published a paper describing how stretchable optical waveguides act as curvature, elongation and force sensors in a soft robotic hand.
Doctoral student Huichan Zhao is lead author of “Optoelectronically Innervated Soft Prosthetic Hand via Stretchable Optical Waveguides,” which is featured in the debut edition of Science Robotics.
“Most robots today have sensors on the outside of the body that detect things from the surface,” Zhao said. “Our sensors are integrated within the body, so they can actually detect forces being transmitted through the thickness of the robot, a lot like we and all organisms do when we feel pain, for example.”
Optical waveguides have been in use since the early 1970s for numerous sensing functions, including tactile, position and acoustic. Fabrication was originally a complicated process, but the advent over the last 20 years of soft lithography and 3-D printing has led to development of elastomeric sensors that are easily produced and incorporated into a soft robotic application.
Shepherd's group employed a four-step soft lithography process to produce the core (through which light propagates), and the cladding (outer surface of the waveguide), which also houses the LED (light-emitting diode) and the photodiode.
The more the prosthetic hand deforms, the more light is lost through the core. That variable loss of light, as detected by the photodiode, is what allows the prosthesis to “sense” its surroundings.
“If no light was lost when we bend the prosthesis, we wouldn't get any information about the state of the sensor,” Shepherd said. “The amount of loss is dependent on how it's bent.”
The group used its optoelectronic prosthesis to perform a variety of tasks, including grasping and probing for both shape and texture. Most notably, the hand was able to scan three tomatoes and determine, by softness, which was the ripest.
###
This work was supported by a grant from Air Force Office of Scientific Research, and made use of the Cornell NanoScale Science and Technology Facility and the Cornell Center for Materials Research, both of which are supported by the National Science Foundation.
Cornell University has television, ISDN and dedicated Skype/Google+ Hangout studios available for media interviews. For additional information, see this Cornell Chronicle story.


Neural networks are one typical structure on which artificial intelligence can be based. The term ›neural‹ describes their learning ability, which to some extent mimics the functioning of neurons in our brains. To be able to work, several key ingredients are required: one of them is an activation function which introduces nonlinearity into the structure. A photonic activation function has important advantages for the implementation of optical neural networks based on light propagation. Researchers in the Stiller Research Group at…

New AI model explains the basis for its decisions and the intention behind actions The Titanic sunk 113 years ago on April 14-15, after hitting an iceberg, with human error likely causing the ship to stray into those dangerous waters. Today, autonomous systems built on artificial intelligence can help ships avoid such accidents, but could such a system explain to the captain why it was maneuvering a certain way? That’s the idea behind explainable AI, which should help human actors…

A research paper by scientists at Shanghai Jiao Tong University presented a novel channel-wise cumulative spike train image-driven model (cwCST-CNN) for hand gesture recognition. The research paper, published on Mar. 21, 2025 in the journal Cyborg and Bionic Systems, leverage a custom convolutional neural network (CNN) to extract both local and global features for classifying hand gestures, by decomposing high-density surface EMG (HD-sEMG) signals into channel-wise cumulative spike trains (cw-CSTs) and reconstructing these into two-dimensional images based on the spatial…

A recent paper published in Engineering titled “Machine Memory Intelligence: Inspired by Human Memory Mechanisms” explores a novel approach to AIby drawing inspiration from the human brain’s memory mechanisms. This research aims to address the limitations of current large models, such as ChatGPT, and paves the way for the development of more efficient and intelligent machines. Large models have achieved remarkable performance in various fields but suffer from several drawbacks. They consume excessive amounts of data and computing power, are prone to…




