










Feeding 9 Billion: Innovations in Agricultural Modeling
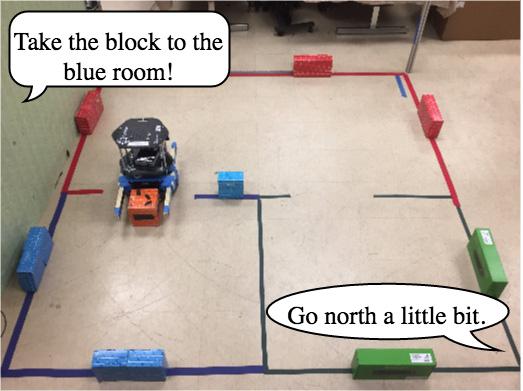
People give instructions at varying levels of abstraction -- from the simple and straightforward ("Go north a bit.") to more complex commands that imply a myriad of subtasks ("Take the block to the blue room."). A new software system helps robots better deal with instructions whatever their level of abstraction.
Credit: Tellex Lab / Brown University
The research was led by Dilip Arumugam and Siddharth Karamcheti, both undergraduates at Brown when the work was performed (Arumugam is now a Brown graduate student). They worked with graduate student Nakul Gopalan and postdoctoral researcher Lawson L.S. Wong in the lab of Stefanie Tellex, a professor of computer science at Brown.
“The issue we're addressing is language grounding, which means having a robot take natural language commands and generate behaviors that successfully complete a task,” Arumugam said. “The problem is that commands can have different levels of abstraction, and that can cause a robot to plan its actions inefficiently or fail to complete the task at all.”
For example, imagine someone in a warehouse working side-by-side with a robotic forklift. The person might say to the robotic partner, “Grab that pallet.” That's a highly abstract command that implies a number of smaller sub-steps — lining up the lift, putting the forks underneath and hoisting it up. However, other common commands might be more fine-grained, involving only a single action: “Tilt the forks back a little,” for example.
Those different levels of abstraction can cause problems for current robot language models, the researchers say. Most models try to identify cues from the words in the command as well as the sentence structure and then infer a desired action from that language. The inference results then trigger a planning algorithm that attempts to solve the task. But without taking into account the specificity of the instructions, the robot might overplan for simple instructions, or underplan for more abstract instructions that involve more sub-steps. That can result in incorrect actions or an overly long planning lag before the robot takes action.
But this new system adds an additional level of sophistication to existing models. In addition to simply inferring a desired task from language, the new system also analyzes the language to infer a distinct level of abstraction.
“That allows us to couple our task inference as well as our inferred specificity level with a hierarchical planner, so we can plan at any level of abstraction,” Arumugam said. “In turn, we can get dramatic speed-ups in performance when executing tasks compared to existing systems.”
To develop their new model, the researchers used Mechanical Turk, Amazon's crowdsourcing marketplace, and a virtual task domain called Cleanup World. The online domain consists of a few color-coded rooms, a robotic agent and an object that can be manipulated — in this case, a chair that can be moved from room to room.
Mechanical Turk volunteers watched the robot agent perform a task in the Cleanup World domain — for example, moving the chair from a red room to an adjacent blue room. Then the volunteers were asked to say what instructions they would have given the robot to get it to perform the task they just watched. The volunteers were given guidance as to the level of specificity their directions should have. The instructions ranged from the high-level: “Take the chair to the blue room” to the stepwise-level: “Take five steps north, turn right, take two more steps, get the chair, turn left, turn left, take five steps south.” A third level of abstraction used terminology somewhere in between those two.
The researchers used the volunteers' spoken instructions to train their system to understand what kinds of words are used in each level of abstraction. From there, the system learned to infer not only a desired action, but also the abstraction level of the command. Knowing both of those things, the system could then trigger its hierarchical planning algorithm to solve the task from the appropriate level.
Having trained their system, the researchers tested it in both the virtual Cleanup World and with an actual Roomba-like robot operating in a physical world similar to the Cleanup World space. They showed that when a robot was able to infer both the task and the specificity of the instructions, it responded to commands in one second 90 percent of the time. In comparison, when no level of specificity was inferred, half of all tasks required 20 or more seconds of planning time.
“We ultimately want to see robots that are helpful partners in our homes and workplaces,” said Tellex, who specializes in human-robot collaboration. “This work is a step toward the goal of enabling people to communicate with robots in much the same way that we communicate with each other.”
###
The work was supported by the National Science Foundation (IIS-1637614), DARPA (W911NF-15-1-0503), NASA (NNX16AR61G) and the Croucher Foundation.


Neural networks are one typical structure on which artificial intelligence can be based. The term ›neural‹ describes their learning ability, which to some extent mimics the functioning of neurons in our brains. To be able to work, several key ingredients are required: one of them is an activation function which introduces nonlinearity into the structure. A photonic activation function has important advantages for the implementation of optical neural networks based on light propagation. Researchers in the Stiller Research Group at…

New AI model explains the basis for its decisions and the intention behind actions The Titanic sunk 113 years ago on April 14-15, after hitting an iceberg, with human error likely causing the ship to stray into those dangerous waters. Today, autonomous systems built on artificial intelligence can help ships avoid such accidents, but could such a system explain to the captain why it was maneuvering a certain way? That’s the idea behind explainable AI, which should help human actors…

A research paper by scientists at Shanghai Jiao Tong University presented a novel channel-wise cumulative spike train image-driven model (cwCST-CNN) for hand gesture recognition. The research paper, published on Mar. 21, 2025 in the journal Cyborg and Bionic Systems, leverage a custom convolutional neural network (CNN) to extract both local and global features for classifying hand gestures, by decomposing high-density surface EMG (HD-sEMG) signals into channel-wise cumulative spike trains (cw-CSTs) and reconstructing these into two-dimensional images based on the spatial…

A recent paper published in Engineering titled “Machine Memory Intelligence: Inspired by Human Memory Mechanisms” explores a novel approach to AIby drawing inspiration from the human brain’s memory mechanisms. This research aims to address the limitations of current large models, such as ChatGPT, and paves the way for the development of more efficient and intelligent machines. Large models have achieved remarkable performance in various fields but suffer from several drawbacks. They consume excessive amounts of data and computing power, are prone to…



